Obstacle Avoidance Tutorial
1. Overview
The obstacle avoidance system detects whether there are obstacles within the flight distance of the aircraft, and will activate the brake mechanism automatically for protection. Currently, the system supports omnidirecional obstacle avoidance: front, rear, top, bottom, left, and right.
2. Enabling/Disabling Obstacle Avoidance
Parameter Configuration
Parameter: VisionKey.KeyObstacleAvoidance
val key = KeyTools.createKey(VisionKey.KeyObstacleAvoidance)
getKeyManager()?.setValue(key, open, object : CommonCallbacks.CompletionCallback {
override fun onSuccess() {
}
override fun onFailure(code: IAutelCode, msg: String?) {
}
})
Warning Distance Parameters
There are warning distance parameters for horizontal, upward, and downward obstacle avoidance, respectively.
Horizontal: VisionKey.KeyHorizontalWarningDistance
Upward: VisionKey.KeyTopWarningDistance
Downward: VisionKey.KeyBottomWarningDistance
Horizontal obstacle avoidance is used as an example.
val key = KeyTools.createKey(VisionKey.KeyHorizontalWarningDistance)
getKeyManager()?.setValue(key, warningDistance, object : CommonCallbacks.CompletionCallback {
override fun onSuccess() {
}
override fun onFailure(code: IAutelCode, msg: String?) {
}
})
Brake Distance Parameters
There are brake distance parameters for horizontal, upward, and downward obstacle avoidance, respectively.
Horizontal: VisionKey.KeyHorizontalBrakeDistance
Upward: VisionKey.KeyTopBrakeDistance
Downward: VisionKey.KeyBottomBrakeDistance
Horizontal obstacle avoidance is used as an example.
val key = KeyTools.createKey(VisionKey.KeyHorizontalBrakeDistance)
getKeyManager()?.setValue(key, brakeDistance, object : CommonCallbacks.CompletionCallback {
override fun onSuccess() {
}
override fun onFailure(code: IAutelCode, msg: String?) {
}
})
3. Reporting Radar Chart
The obstacle avoidance distance information during flight will be reported in real time, which contrasts the actual distance between obstacles with the warning and braking distances in the abovementioned directions.
val keyWarning = KeyTools.createKey(VisionKey.KeyReportEmergency)
getKeyManager()?.listen(keyWarning, object : CommonCallbacks.KeyListener<List<VisionRadarInfoBean>> {
override fun onValueChange(oldValue: List<VisionRadarInfoBean>?,newValue: List<VisionRadarInfoBean>) {
}
})
Vision And Radar Information
data class VisionRadarInfoBean(
var timeStamp: Long = 0,//Timestamp
var position: VisionSensorPositionEnum = VisionSensorPositionEnum.FRONT,//Sensor position
var distances: List<Float>? = null//Distances between sensors and obstacles
)
Vision Sensor Position
enum class VisionSensorPositionEnum(var value: Int) {
FRONT(0), //Front
REAR(1), //Rear
BOTTOM(2), //Bottom
RIGHT(3), //Right
LEFT(4), //Left
TOP(5) //Top
}
Sample
val keyWarning = KeyTools.createKey(VisionKey.KeyReportEmergency)
getKeyManager()?.listen(keyWarning, object : CommonCallbacks.KeyListener<List<VisionRadarInfoBean>> {
override fun onValueChange(oldValue: List<VisionRadarInfoBean>?, newValue: List<VisionRadarInfoBean>) {
for (value in newValue) {
if (value.position == VisionSensorPositionEnum.TOP) {
val distanceList = value.distances
if (distanceList != null) {
if (distanceList.min() < getTopWarningDistance()) {
ToastUtils.showToast("Upward obstacles. Fly with caution.")
}
}
}
}
}
})
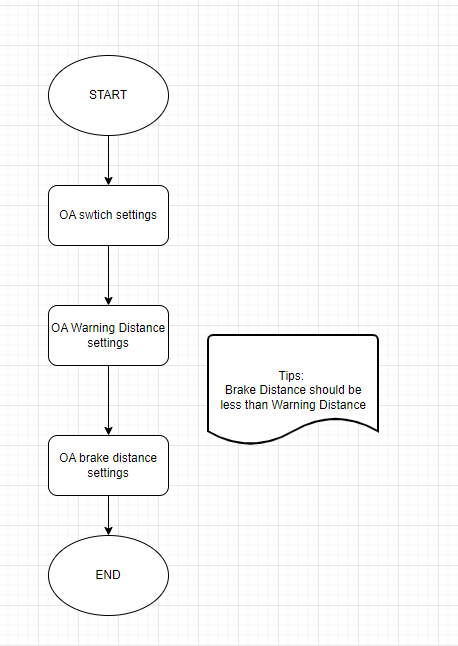
4. API Calling Procedure